失くし物を見つけるAIロボ、3D地図で家中探索
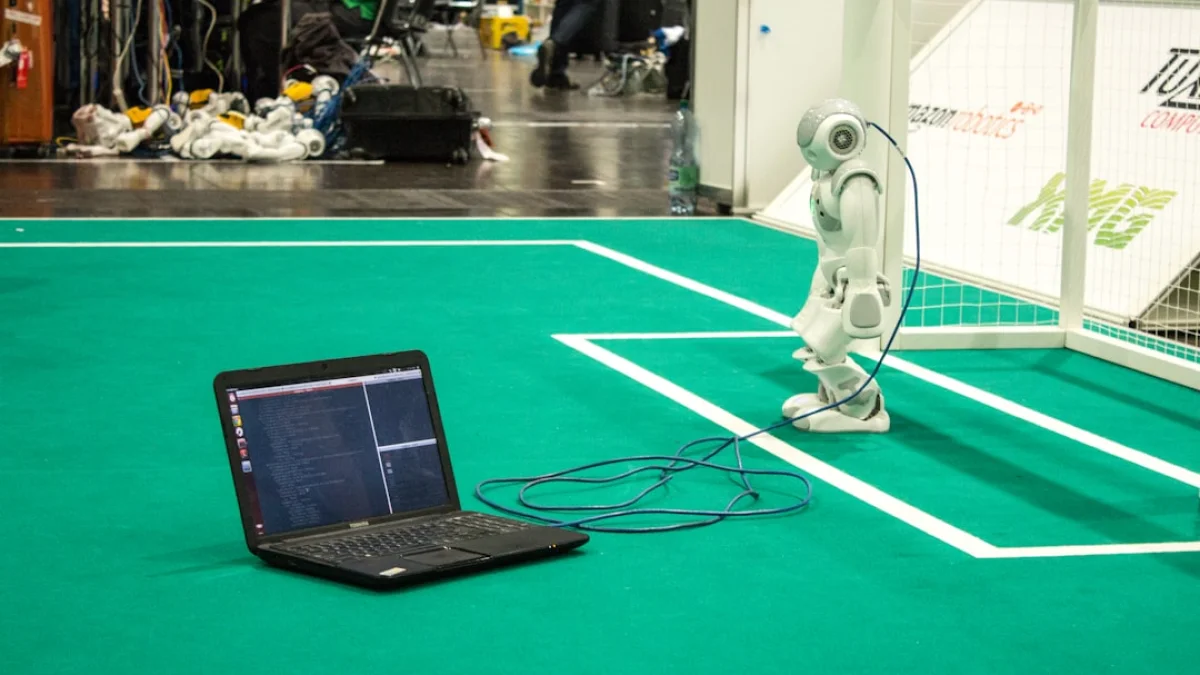
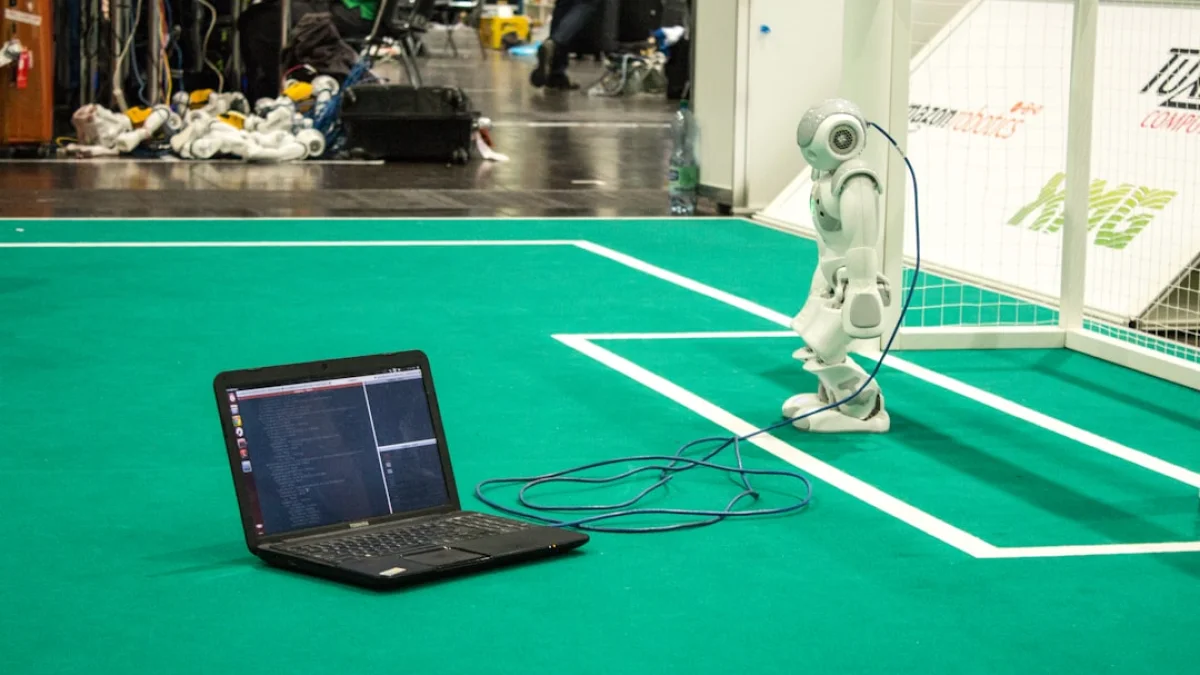
TUM(ミュンヘン工科大学)のAngela Schoellig研究室が開発したAI探索ロボは、室内の3D地図とウェブ上の知識を組み合わせ、ホウキ型の機体で候補位置を推定し家中の失くし物を効率的に見つける可能性を示しています。
指示一つで家中を探す未来が近づく
ふとした瞬間に鍵やリモコンを失くした経験は誰にでもあります。そんなとき、指示一つで家の中を探してくれるロボットがいたら心強いはずです。技術大学ミュンヘン(TUM)のAngela Schoellig研究室が開発した最新のAI探索ロボは、まさにそのイメージに近づいています。
3D地図とウェブ知識を同時に使う仕組み
このロボットは周囲の3D地図と画像認識を組み合わせて動きます。3D地図とは、空間の形や位置関係を三次元データで表した地図のことです。さらに、インターネット上にある一般的な物の位置に関する知識(例えば「リモコンはソファ付近に置かれがち」など)を参照して、候補位置を絞り込みます。イメージとしては、地図を持った探偵がウェブで得た“常識”も同時に使うような感覚です。
外観と設計の狙い
外観はホウキのような細長い形で、上部にカメラを搭載しています。こうした形状は室内での取り回しや視野確保に有利です。カメラ視点から得た画像を3D地図と照らし合わせ、確率的に「ここにあるはず」と推定して探索を進めます。
長所と現実的な課題
このアプローチの強みは、空間認識と豊富な知識を組み合わせることで探索効率が上がる点です。特に見当がつかない場所でも候補を絞れるのは実用的です。一方で、照明条件や物の向き、家具による遮蔽などで認識精度が落ちる課題があります。また、家庭ごとのレイアウト差に対する汎化も改善が必要です。
社会的影響と安全性の配慮
捜索・探索、物流、介護現場など応用は広がります。作業負担の軽減や時間短縮につながる期待がありますが、同時にプライバシーや監視リスク、誤認識による安全性の問題も考える必要があります。開発段階から倫理や利用ルールの整備が重要です。
これからに期待すること
技術は着実に進んでいます。3D地図とネット知識を賢く組み合わせる発想は、ロボットの自律的な判断力を高める有力な道筋です。実用化に向けては、認識精度の向上と利用者の信頼を得る仕組みづくりが鍵になるでしょう。近い将来、家の中で「ねぇ、鍵どこ?」と聞くと、ロボットがにこやかに教えてくれる日が来るかもしれません。