家事ロボの判断力を試す新AIベンチマーク
マイクロソフトと学術チームが、家事ロボの判断力を現場で試す新たな評価基準(ベンチマーク)を公開しました。実用化に向けて精度向上と現場検証の重要性を示す一歩です。
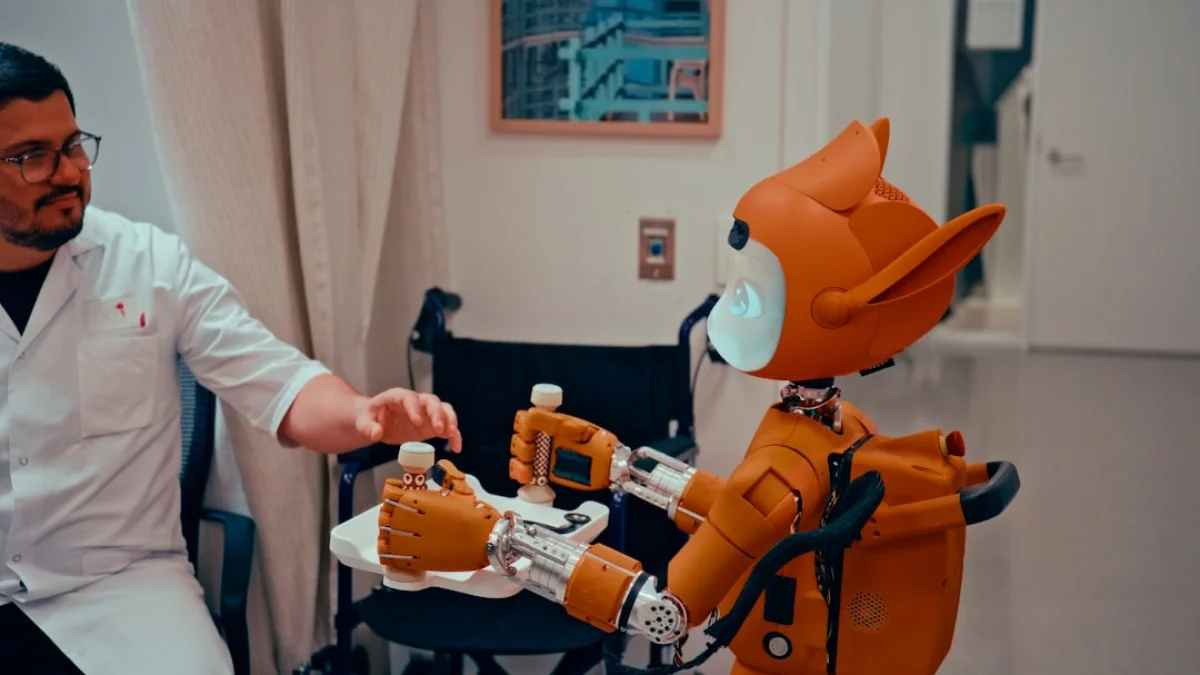
掃除や片付けを命じたロボットが、目の前で何を掴むべきか迷って動けなくなる――こんな光景を想像してください。家事タスクでは、単に「掃除して」と言うだけでは不十分で、物をどう扱うかまで決める能力が求められます。
ベンチマークとは何か
ここで登場するベンチマークとは、性能評価の基準を指します。今回のベンチマークは、家事のような現場志向の多段階タスクで、ロボットがどれだけ正確に計画を立てて実行できるかを測ります。ロボット計画とは、どの物体をどう掴み、どの順番で作業するかを決めるアルゴリズムのことです。
目的は「現場で使える計画」を作ること
マイクロソフトと複数の学術機関チームがこの評価基準を公開しました。狙いは、研究室の理想的な条件ではなく、生活空間の雑多さや不確実さにも耐える計画を育てることです。部屋をきれいにする場面で、ロボットが「どの物をまず掴むか」でつまずく例を想定して設計されています。
仕組みと公開の背景
詳細はarXivのプレプリント論文で公開されています。従来手法と比較して、計画の安定性や現場適応性の改善を評価できるように設計されていますが、すべての課題が一朝一夕に解決するわけではありません。公開データやシナリオは有益ですが、実機での追加検証が重要だと著者らは述べています。
見えてきた課題点
現場では多段階タスクの順序決定や、物体の取り扱いの安定性が難問です。たとえば同じ「コップ」を拾うにしても、割れやすさや中身の有無で掴み方は変わります。こうした多様な状況を再現するデータの多様性と、シナリオの再現性をどう確保するかが鍵になります。
産業や開発現場への影響
恩恵を受けるのはロボット開発者や導入を検討する企業です。標準化された評価基準があれば、異なる手法の比較がしやすくなります。結果として、計画の信頼性や現場適応性を高める方向へと研究と製品開発が進むでしょう。
実用化への現実的な道筋
過度な期待は禁物です。提案者たちは、まず限定的なタスク範囲で段階的に実用化することを勧めています。安全性と信頼性を最優先に、標準化された評価と現場検証を繰り返すことで、徐々に適用範囲を広げるのが現実的なアプローチです。
おわりに
このベンチマークは、研究と実用の橋渡しを目指す一歩です。地図のない旅に地図を一枚追加するようなもので、まだ道は続きますが、確実に現場に近づく助けになるでしょう。今後は多様な環境での評価と実機検証が進み、家事ロボの“判断力”が一段と向上することが期待されます。