ロボット、単一タスクは得意も複数コマンドに同時対応困難――汎用化への大きな課題
ヒューマノイドロボットはカクテル調製やマラソン走行など個別タスクでは高い能力を示すが、複数のコマンドに柔軟に応じる汎用性に欠ける。実用化には VLA モデルやワールドモデルなど新技術の登場が必須。
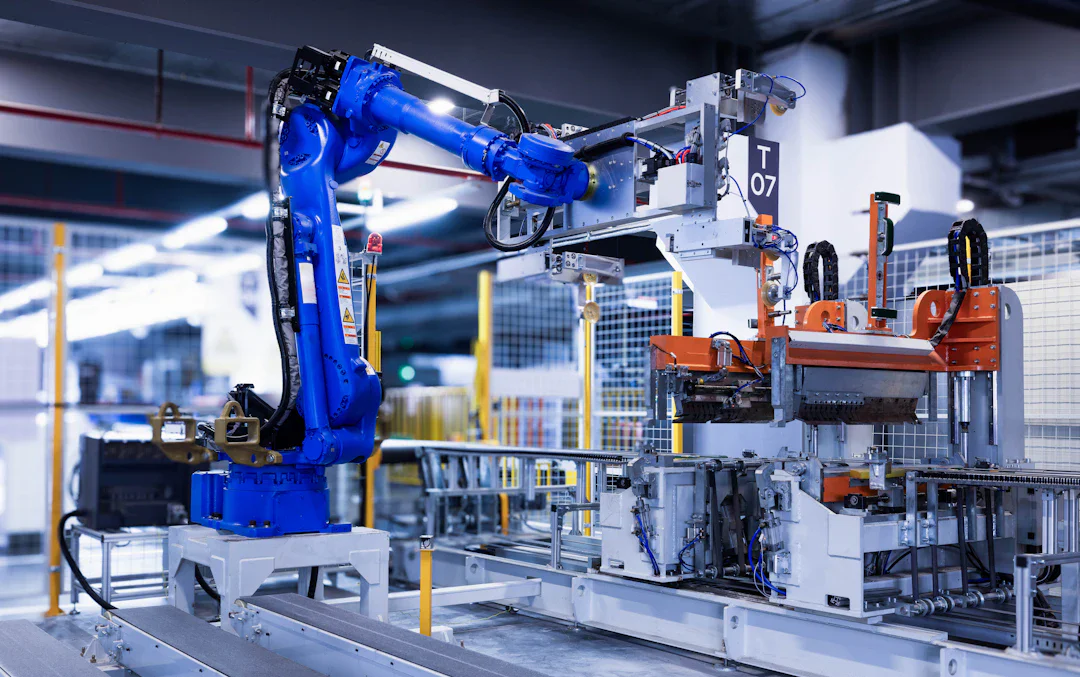
現在のヒューマノイドロボットは、カクテルの調製やマラソン走行、さらには衣類の折り畳みなど、個別の特定タスクでは高い能力を発揮している。しかし、複数の異なるコマンドに次々と応じるという「マルチタスク対応」の能力については、大きな制限を抱えたままだ。
高い専門性と低い汎用性のギャップ
多くのロボットメーカーは、特定タスクの達成を優先し、遠隔操作またはプリプログラムされた狭い業務領域に限定した設計を採用している。このアプローチは個別タスクの効率化には優れているが、同じロボットが異なる複数の仕事を柔軟にこなすことは難しい。
汎用化を阻む技術的障壁
ロボットが複数タスクに対応できない主な理由は、現在の AI システムが非決定論的であることと、安全性の基準をまだ満たしていないことにある。
- 決定論的な動作の欠落: 予測不可能な AI システムでは、ロボットが安全に複数タスクを切り替えられない
- 安全基準未達: 人間との共有環境で動作するロボットには、高い安全性が求められるが、現在のシステムはこれを実装できていない
実用化に向けた新技術の登場
汎用ロボットの実現に向け、複数の有望な技術が開発中だ:
VLA(視覚言語行動)モデル カメラ映像とテキスト指示を組み合わせることで、視覚情報と行動を統合する。これにより、ロボットは視覚的な状況判断に基づいて複数の動作選択肢から最適なものを選べるようになる。
ワールドモデル 大量の画像・動画データから物理法則を学習するアプローチ。ロボットが実世界の結果を予測できれば、より柔軟で安全なタスク切り替えが可能になる。
ロボットハンド技術の進化 繊細な把握能力と人間の皮膚感知に近い感度を備えた次世代ハンドが開発されており、より複雑で多様なタスク対応を支える。
人間動作データの大規模収集が加速
汎用ロボットの学習に必要な人間動作データの収集が、世界中で加速している。複数のタスクをこなすロボットを訓練するには、膨大で多様な動作パターンが必要であり、企業は多国籍な労働力から学習用データの提供を受けている。
実用的な汎用ロボットの登場には、まだ数年の期間が必要と見られている。個別タスク専門の現在のロボットから、真の意味で「使える」汎用ロボットへの道のりは長い。